CAN Bus
| Responsible |
|
| Last Updated | 10/12/2025, 12:48:54 PM |
| Last Author | Kai Berszin |
For communication between OBC and PAY (as well as within other components), we use the libcsp library.
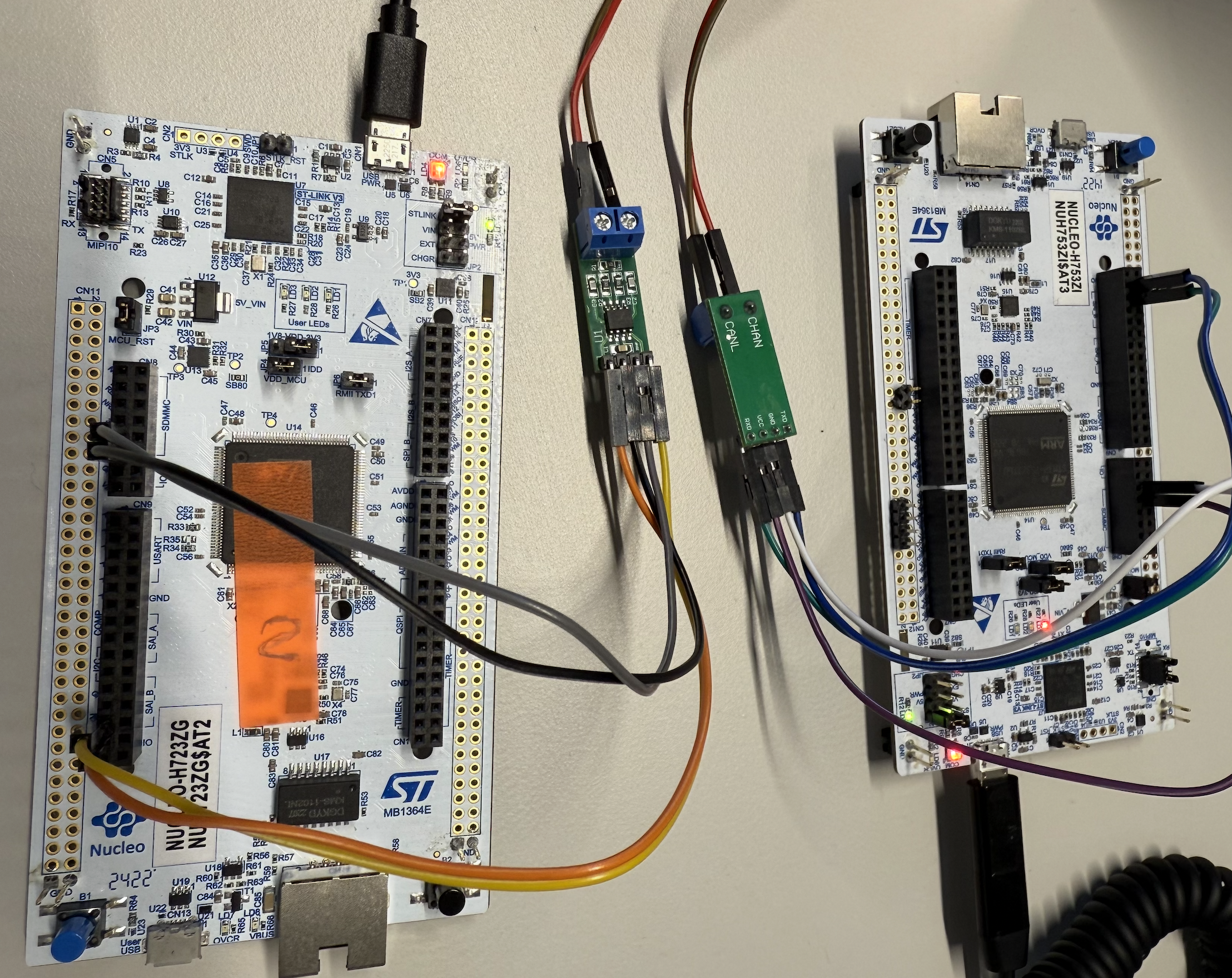
We (Ilya and Marouan) ran a set of experiments between one Nucleo board (nucleo_h723zg) from PAY and one board from the OBC team.
PAY code can be found here (samples/libcsp_client) and is run using Zephyr OS and the libcsp library (dev version). The OBC team implemented their code on FreeRTOS.
We decided on using the following definitions for communication over CAN, until we decide to change them in the future:
#define CSP_OBC_PORT 10
#define CSP_PAY_ADRESS 2
#define CSP_OBC_ADRESS 1
#define MY_BITRATE 500000
For testing we use simple CAN Transceivers TJA1050 Plugged in into default CAN pins (see image below)
Changelog
| Date | Revision | Change |
|---|---|---|
| 2025/05/30 | 01 | PAY met OBC to establish the first contact over CAN Bus |