| Responsible |
|
| Last Updated | 10/12/2025, 12:48:54 PM |
| Last Author | Kai Berszin |
Detumbling
Scope
This page concerns the software system involved with detumbling, the process of controlling Rotational speed to stabalize the satelite. More detailed infromation can be found in the thesis written by Chantel Woodtli.
About Detumbling
The detumbling functions using the mechanism of magnetorquers to affect the Satelite's rotation. It has a number of modes, which may be used in different circumstances. The most basic is B-dot, which activates the Magnetorquers based on how strongly the observed magnetic field changes, proportional to amount of the satelite's spin, resulting in a smooth detumbling process. Bang Bang B-dot (Bdot3) is the more aggressive variation, applying the magnetorquers as intensely as possible in the opposite direction of rotation. ConDetumbling only allows one of the magnetorquers to work at a time. Between these, Bdot3 generally uses the most energy, but allows for the fastest detumbling, with B-dot detumbling requiring less energy but having lesser scale of effect, and ConDetumbling requiring even less energy but having an even smaller effect.
Simulation Setup
The Detumbling Simulation is in units of degrees per second, and lasts 24 hours. It covers a number of different Scenarios, with starting values for inital X axis speed, inital Y axis speed, initial Z axis speed. The following initial rates in deg\s have been used:
| Variation | X | Y | Z |
|---|---|---|---|
| 1 | 50 | 50 | 50 |
| 2 | 60 | 45 | 30 |
| 3 | 60 | 30 | 20 |
| 4 | 5 | 4 | 2 |
| 5 | 100 | 100 | 100 |
The other relevant changes to default "aris-sage.eos" file for the detumbling simulation are listed in the table below:
| EOS attribute | Setup |
|---|---|
| Simulation Start | "2025-01-01T12:00:00" |
| Simulation End | "2025-02-01T14:00:00" |
| Simulation Durations | "26:00:00" |
| Simulaiton Period | "00:00:00.2000000" (0.2s) |
| Sample Period | "00:00:00.2000000" (0.2s) |
The scheduled settings of the Bdot Controller simulations were set in the following way in the xml file: | Property | Time | Object | Value | |-------------------|------|--------------|-------| | Estimation Mode | 0 | CubeComputer | 1 | | Control Mode | 100 | CubeComputer | 1 |
The scheduled settings of the Bdot3 (Bang Bang B-Dot) simulations were set in the following way in the xml file: | Property | Time | Object | Value | |-------------------|------|--------------|-------| | Estimation Mode | 0 | CubeComputer | 1 | | Control Mode | 100 | CubeComputer | 3 |
The scheduled settings of the ConDetumble simulations were set in the following way in the xml file: | Property | Time | Object | Value | |-------------------|------|--------------|-------| | Estimation Mode | 0 | CubeComputer | 1 | | Control Mode | 100 | CubeComputer | 4 |
Results
Main Results
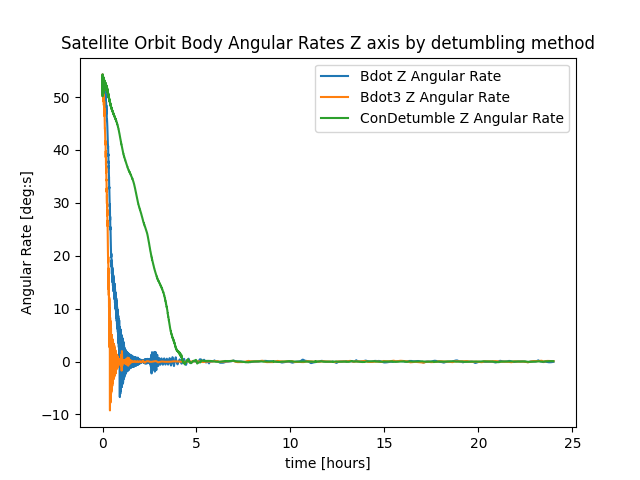
These charts document the simulation results over 24 hours, using Degrees per secont as the measurement unit.
In Variation 1, all three detumbling variations are able to bring the tumbling to a stable state within 5 hours, though the follow the expected speed order, with Bdot3 Detumbling being fastest, the standard Bdot, then Condetumbling.
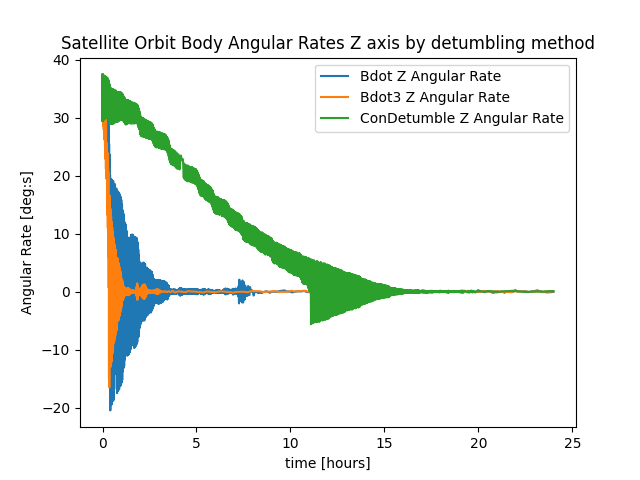
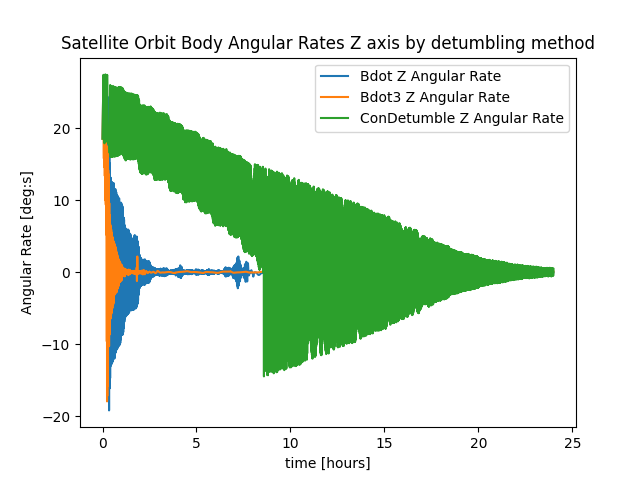
In Variation 2, which involves significantly higher initial rotation on one axis then on the other two, All three modes take somewhat longer to achieve permanent stability, but Condetumbling takes up to 20 hours.
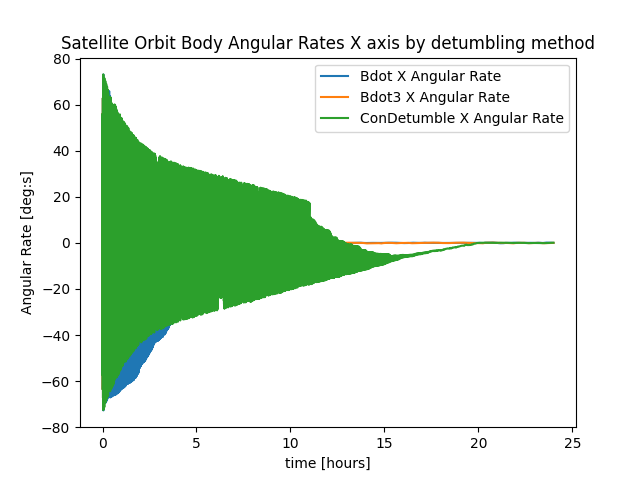
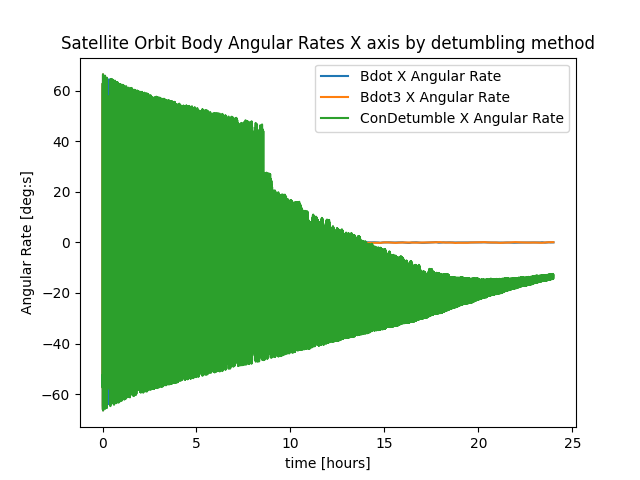
In Variation 3, where the disparity is even greater, Condetumble struggles even more, not achieving stability on all axes within the first 24 hours.
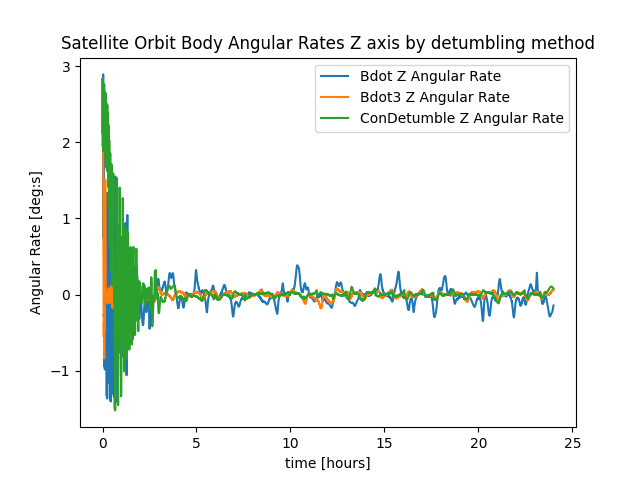
In Variation 4, with relatively low values on all axes, realtive stability is achieved quickly, but one can also see that complete stability is not achieved, with minor rotations persisting regarless of detumbling mode.
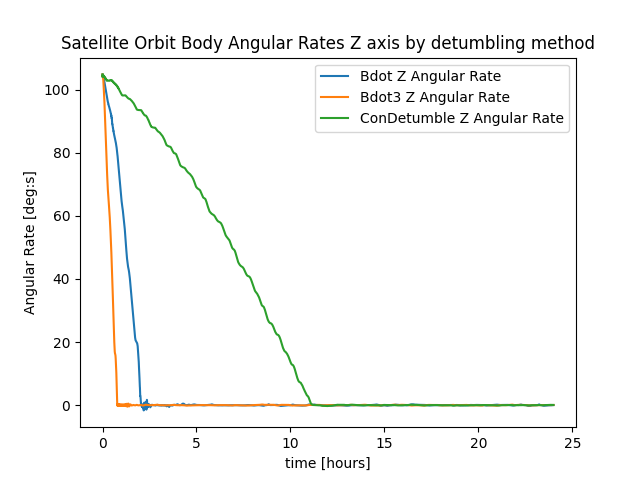
In variation 5, with significantly higher values on each axis, stability is achieved by both Bdot variations within 3 hours, but it takes more then 10 hours for ConDetumble to achieve full stability on the Z Axis.
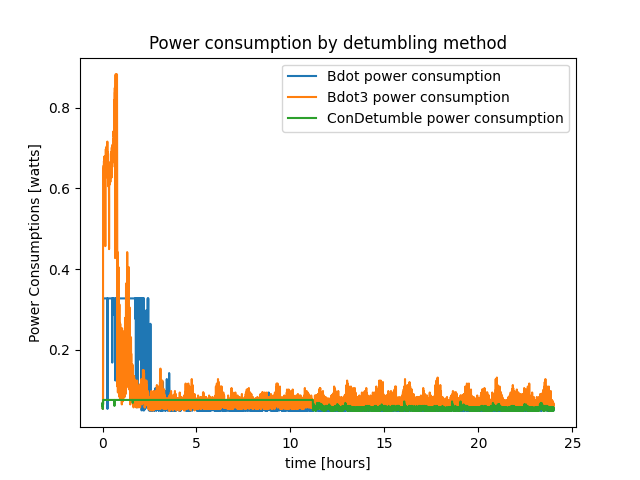
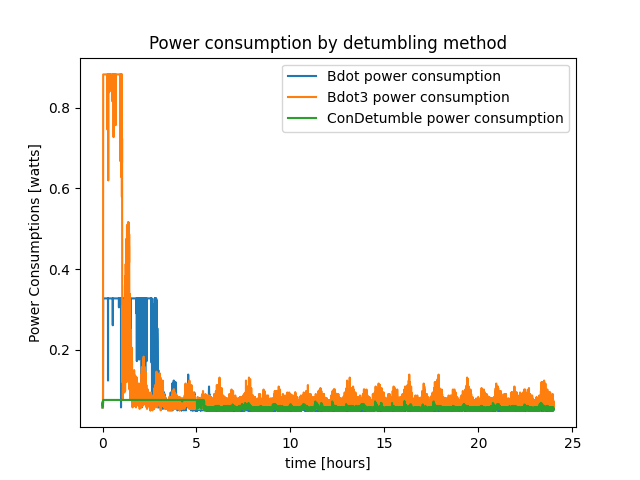
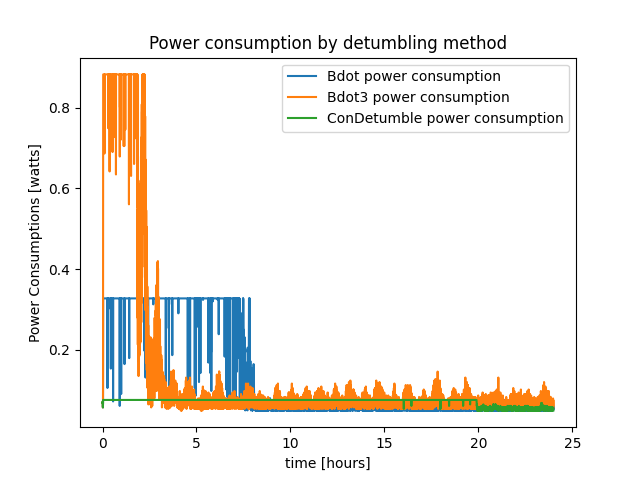
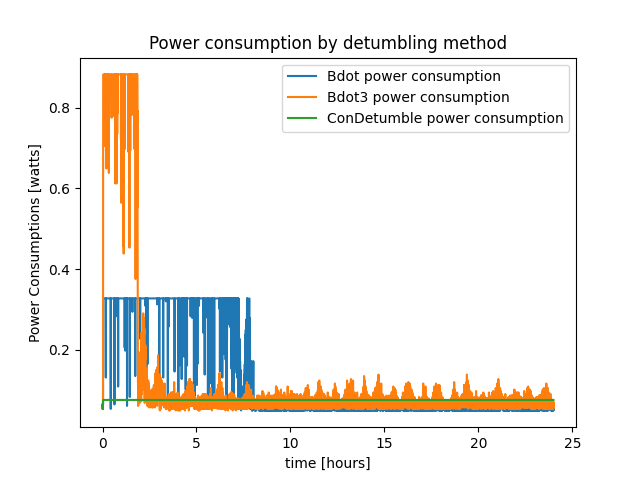
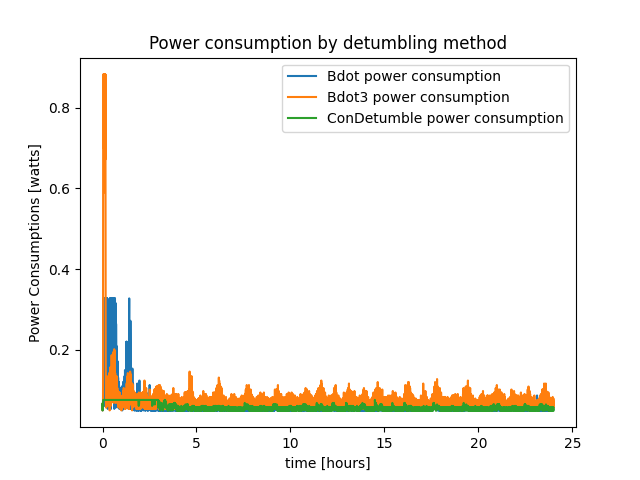
Energy Consumption
These charts document the Consistently, the power consumption of Bdot3 detumbling starts very high, before decresing rapidly, Bdot detumbling behins significantly lower, decreasing somewhat more slowly, while ConDetumbling is consistently quite low. In general, power consumption is strongly proportional to the level of detumbling necessary.
Scenario 1
Scenario 2
Scenario 3
Scenario 4
Scenario 5