| Responsible |
|
| Last Updated | 10/12/2025, 12:48:54 PM |
| Last Author | Kai Berszin |
ADCS Operational Modes
Scope
This page lists and describes the different modes of operation of the ADCS system. It also includes a table listing what hardware is requiered for what mode. In addition, CubeSpace based compatibility of different Control and Estimation modes are given. Lastly, a pointer to the Documentation from CubeSpace regarding updating of parameters is linked below.
Operational Modes
The ADCS components will allow the SAGE satellite to maintain control over its orien- tation in space in order to achieve all mission objectives. It should be able to operate in the following 4 modes:
- Detumbling Mode: After the satellite deployment, it has to be able to bring its rotational velocities to 0 using only magnetometers and magnetorquers.
- Ground Tracking Mode: For the communication with the satellite to be possible, the antenna positioned on the -z face of the satellite has to be pointed at the ground station with at most 5 degree deviation.
- Sun Pointing Mode: To harvest solar energy, the satellite has to orient its solar panels at the Sun with at most 7 degree deviation.
- Safe Mode: ADCS components not powered for launch.
The Artificial Gravity mode has been removed from the mission.
Used Hardware
The hardware used for each mode is displayed in the following table:
| Hardware Name | Detumbling | Ground Tracking | Sun Pointing |
|---|---|---|---|
| ADCS Computer | [x] | [x] | [x] |
| Reaction Wheel | [x] | [x] | |
| Magnetorquer | [x] | [x] | [x] |
| Fine Sun Sensor | [x] | [x] | |
| Coarse Sun Sensor | [x] | [x] | |
| Earth Sensor | [x] | [x] | |
| Magnetometer | [x] | [x] | [x] |
| GNSS | [x] | [x] | [x] |
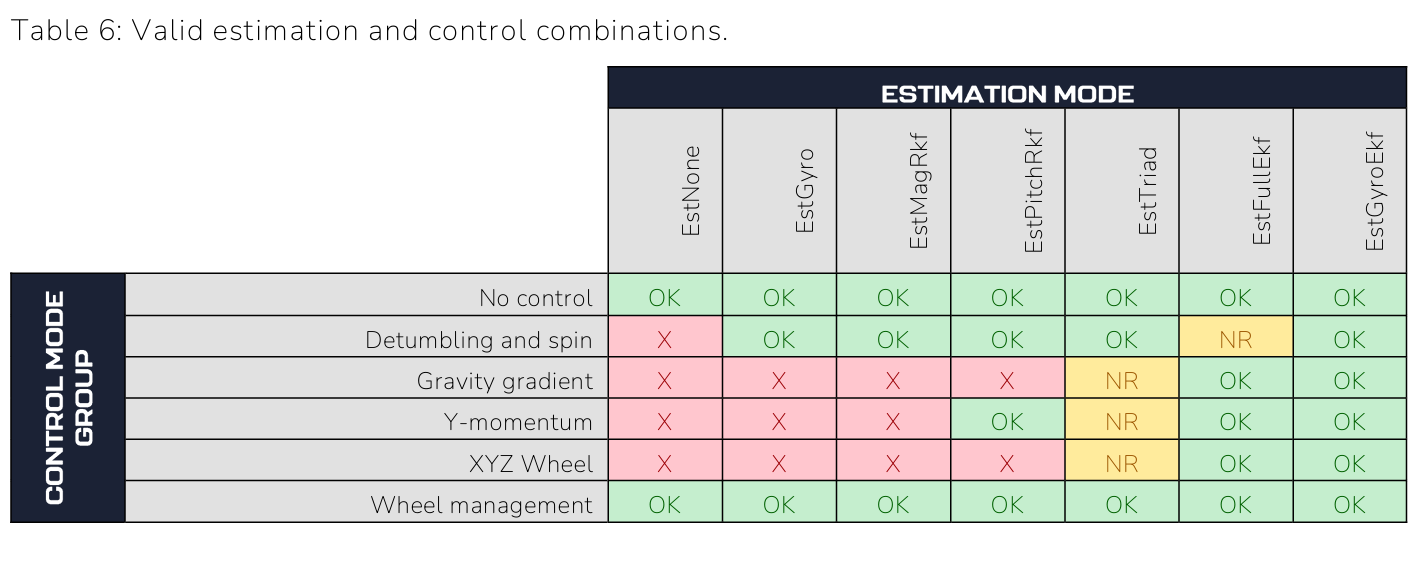
Compatible Operational Modes
The following graphic shows, what estimator modes and controller modes can be run at the same time:
Ground Station Communication
The ADCS system can be modified in orbit via telecommands as documented on page 40ff of the CubeSpace Commissioning and Operations Manual. The configuration values and reference values of the estimator can be set with the "ConfigAdcsEstimator" command. Analogously, the Controller gains can be modified with the "ConfigAdcsController" command.