| Responsible |
|
| Last Updated | 10/12/2025, 12:48:54 PM |
| Last Author | Kai Berszin |
Reaction Wheels
Scope
This page describes the hardware properties of the CubeWheel and the mathematical description of the functionality of the Reaction Wheels.
CubeWheel
 The Magnetorquer has the following specifications:
The Magnetorquer has the following specifications:
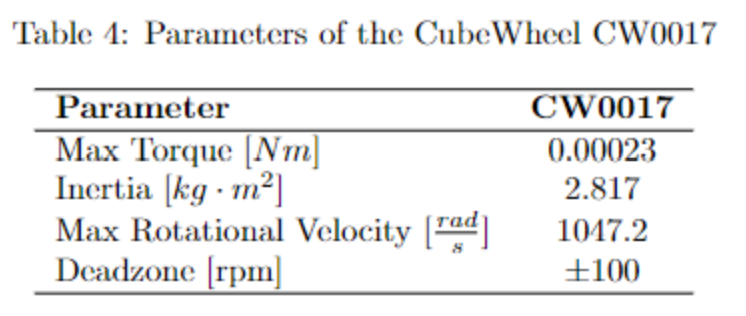 More specifications can be found on the CubeSpace Website
More specifications can be found on the CubeSpace Website
Mathematical Description
The relevant reaction wheel dynamics are given by:
is the angular velocity of the wheel in satellite frame, is its inertia matrix in satellite frame and is the applied torque on the satellite in satellite frame.
To properly simulate the gyroscopic precession caused by the satellite rotating with the reaction wheels inside, the reaction wheel rotational velocity is the combination of the rotational velocity of the satellite sat and RW the rotational velocity of the reaction wheel itself around its axis of rotation in satellite frame :
sat + RW.
However, the device receives the desired rotational velocity around its axis of rotation as an input command, so we need to model
and we must not forget the velocity update . is the control cycle length.
The power consumption of the reaction wheels is modelled as a linear function of the angular velocity . The constant depends on the exact device being simulated.